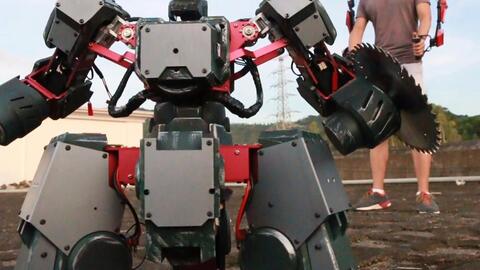
摘要:一台重达65公斤的机器人被意外推倒后,通过自主内置的智能恢复系统,成功实现了自我稳定并继续前行。该机器人具备先进的平衡感知技术和自我修复能力,即使在受到干扰的情况下,也能迅速调整状态,恢复运作。这一表现展示了现代机器人技术的智能化和稳定性,为未来的机器人应用提供了重要的技术参考。
本文目录导读:
随着科技的飞速发展,机器人技术日新月异,智能化、自主化的机器人已经逐渐融入我们的日常生活,有一款重达65公斤的机器人,在遭受推倒的挫折后,凭借其强大的自我恢复能力,能够自主爬起来,继续前行,这正是现代机器人技术的一大突破与创新。
机器人的坚韧构造
这款机器人之所以在被推倒后能够自行爬起来,首先得益于其独特的设计和构造,机器人的材质和结构设计充分考虑了抗压性和恢复性,其强大的骨骼结构和耐冲击的材料使得机器人能够在遭受外力推倒时,迅速稳定自身,为爬起来做好准备。

智能感应与决策系统
机器人的智能感应与决策系统是另一大关键,当机器人被推倒后,其内置的惯性测量单元会迅速感知到这一变化,并将信息传递给中央处理单元,中央处理单元根据接收到的信息,结合机器人的当前状态和环境信息,做出决策:如何以最优的方式爬起来。
动态平衡与强力驱动
机器人的动态平衡能力是其自我恢复的重要组成部分,通过精密的传感器和算法,机器人能够实时调整自身的姿态和重心,以保持平衡,在被推倒后,机器人会利用这一能力,迅速调整重心,为爬起来做好准备,机器人的强力驱动系统也发挥了重要作用,通过高效的电机和精密的控制算法,机器人能够产生足够的动力,使其成功爬起来。
环境感知与适应
环境感知能力也是机器人能够自我恢复的重要因素之一,通过摄像头、红外线等传感器,机器人能够感知周围的环境,并根据环境的变化调整自身的行为,在被推倒后,机器人会根据周围的环境信息,选择最佳的爬起来路径和方式。

实际应用与前景展望
这款65公斤的机器人能够在遭受推倒后自我恢复并前行,其技术在实际应用中具有广阔的前景,在工业生产线上,机器人需要面对各种复杂的环境和挑战,这款机器人的自我恢复能力将大大提高其工作效率和稳定性,在救援、探险等危险环境中,这种机器人的自我恢复能力也将发挥巨大的作用。
技术挑战与未来发展
尽管这款机器人在被推倒后能够自我恢复并前行,但这一技术仍面临一些挑战,机器人的自我恢复能力需要在各种环境和条件下进行验证和优化,如何提高机器人在恢复过程中的效率和稳定性,仍是一个需要解决的问题,随着技术的不断发展,未来机器人需要实现更高级的自我恢复能力,以应对更加复杂的挑战。
这款65公斤的机器人被推倒后能自行爬起来,是现代机器人技术的一大突破与创新,其强大的构造、智能感应与决策系统、动态平衡与强力驱动以及环境感知与适应能力,使得机器人在遭受挫折后能够迅速恢复并继续前行,这一技术在实际应用中具有广阔的前景,未来随着技术的不断发展,我们将看到更多高级的自我恢复机器人在各个领域发挥巨大的作用。